摘要:
本文介绍 MOONS’(鸣志)步进电机驱动器EtherCAT协议与基恩士PLC通讯应用,主要介绍驱动器的配置以及基恩士PLC方面的配置,实现PLC控制驱动器动作的目的。
硬件配置:
PLC:基恩士KV8000 KV-XH16EC KV STUDIO V10.02
步进电机驱动器:上海鸣志STF05-ECX-H Stepper Suite V3.0.20.0128
XML描述文件:上海鸣志STF系列 AMA Stepper EtherCAT V3.1.4
1、步进电机驱动器配置
1 .1 连接驱动器
STF-ECX-H 系列驱动器使用通用的 miniUSB 数据线,打开 Stepper Suite 软件,选择 USB
端口,连接驱动器。
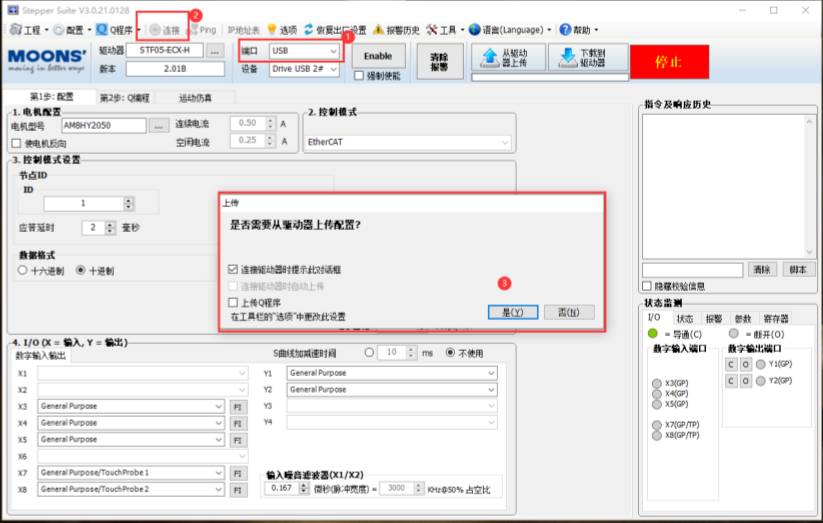
1、端口选择“USB”,驱动器型号不需要选择
2、点击连接,(也可以不用点,端口选择后,等待几秒会自动连接)
3、如果正常连接驱动器了,就会弹出此对话框,直接选择“是”即可
注意:如果连不上驱动器,可以尝试驱动器断电、软件重启,多试几次,一般都能正常
连接,如果还是连接不上,就需要更换数据线、更换电脑、或者更换驱动器。
1.2配置电机参数
驱动器如果连接的电机是鸣志的电机,则直接选择对应的型号,其他参数可以不做任何
更改,直接使用默认值即可。

1、点击进入点击电机参数配置界面
2、选择标准电机,在下拉列表选择具体的型号即可
注意:电机参数设置完成后,需要下载,并断电重启驱动器,才能生效!
驱动器如果连接的电机是第三方的电机,则需要填写具体的电流、力矩、惯量等电机参
数,这些参数都由电机厂商提供。
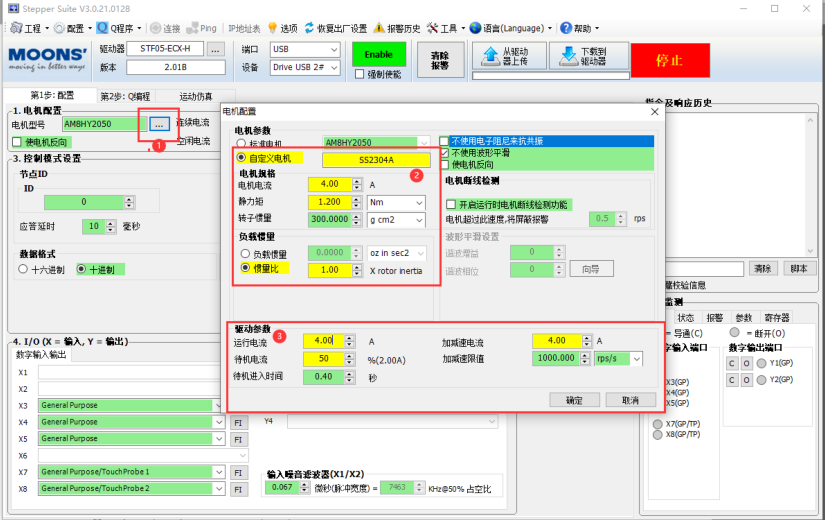
1、点击进入点击配置界面
2、选择自定义电机,输入自定义名称; 输入参数:电流、静力矩、转子惯量。填写时候
请注意单位!
3、运行电流、待机电流、加减速电流参数可以不填,按默认值即可
注意:电机参数设置完成后,需要下载,并断电重启驱动器,才能生效!
1 .3 配置IO信号
驱动器上需要配置限位和原点功能,X3 和 X4 接限位,X5~X8 任意一个接原点都可以。
限位和原点都支持常开接法或者常闭接法(原点常闭接法仅限 STF-ECX-H 驱动器)。
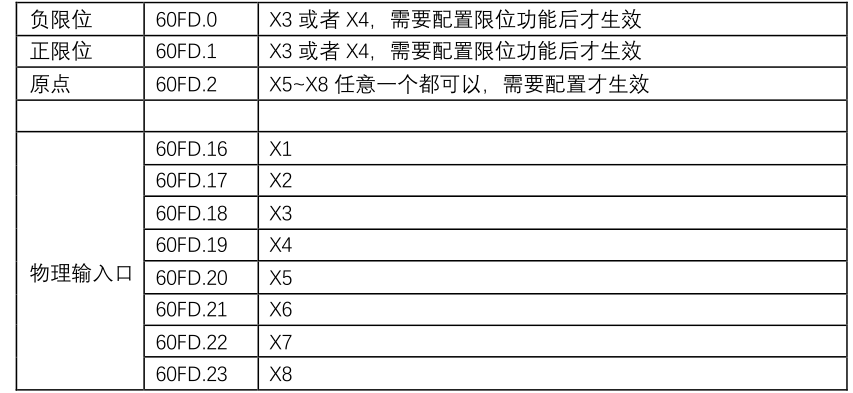
驱动器的 60FD 对象字典 bit 对应如下:
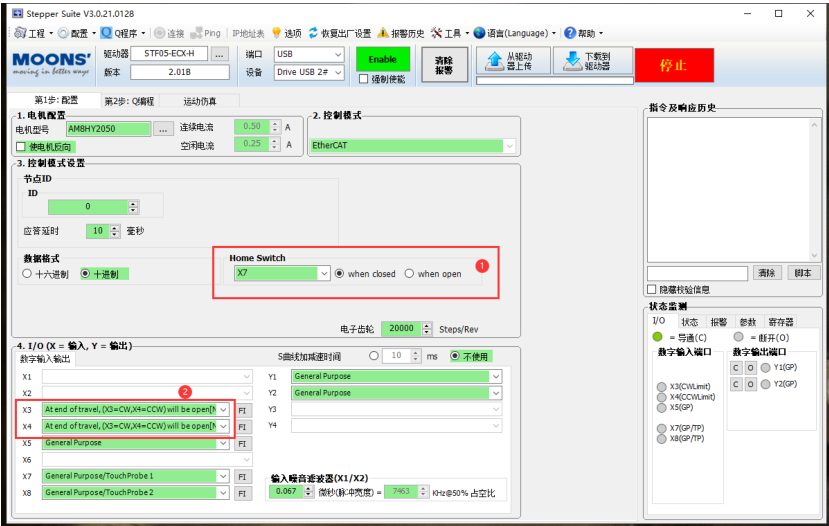
1、设置原点,选择X7 表示原点信号接到了 X7 口,可选择常开或者常闭(closed 表示
接的传感器是常开信号,open 表示接的传感器是常闭信号)
2、设置限位。必须设置后缀带[No alarm]的选项!
注意:IO 配置完成后,点击“下载到驱动器后”,无需断电重启,立即生效。
CW 表示正限位
CCW 表示负限位
Closed 表示外部接的信号是常开型
Open 表示外部接的信号是常闭型
No alarm 表示驱动器对限位信号不做处理,即驱动器碰到限位后,不会报警,也不会停机,
只负责把对应的信号上传到 60FD.0 和 60FD.1 中。
例 1:X3 接正限位,X4 接负限位,都是常闭点:
例 2:X3 接正限位,X4 接负限位,都是常开点:
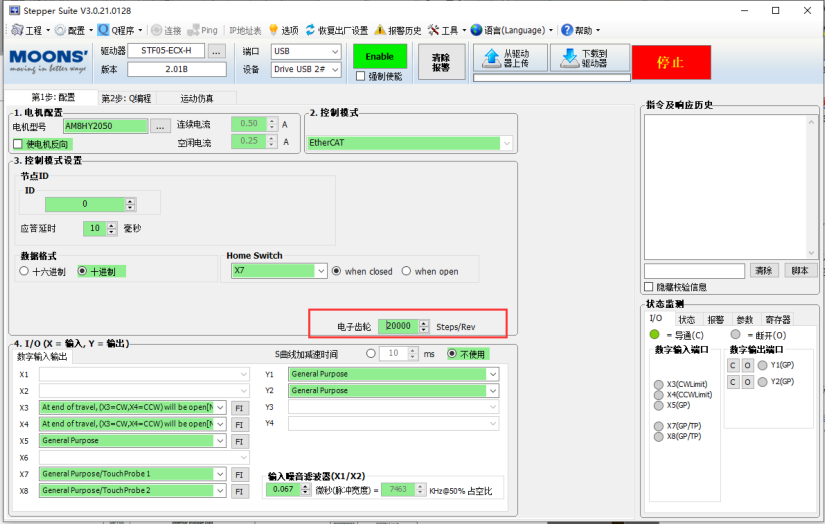
1 .4 设置电子齿轮比
电子齿轮比(细分):设置电机旋转一圈需要的脉冲数,可以根据实际情况进行更改,
范围为 200~51200, 默认 20000。
2、基恩士 PLC 的配置
2.1 注册 E EI SI 文件
打开基恩士 KV STUDIO 软件,如果是第一次使用鸣志的驱动器,则需要首先注册驱动
器的 ESI 描述文件。
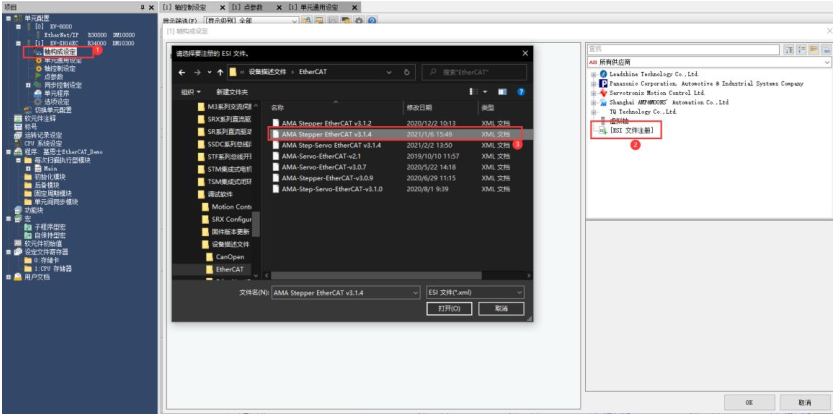
1、双击“轴构成设定”,打开设定界面
2、双击“[ESI 文件注册]”
3、找到存放 xml 文件的本地路径,选中要注册的 XML 文件
注意:注册成功后,列表中会显示如下信息,如果未成功显示,则重启软件。
注意:如果未显示,可能需要重启 KV STUDIO
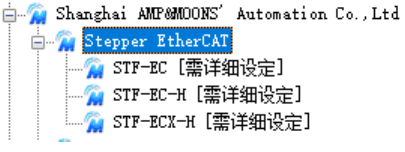
2.2 添加轴从站
展开列表,选择一个“STF-ECX-H”驱动器,并进入从站的详细设定界面:

1、选择类型为:步进电机
2、扩展设定选择:使用
注意:使用扩展设定,主要是为了将“初始化通信指令”一栏显示出来,可以在驱动器进行 CoE
初始化时添加用户指定的通信指令。
2.3 添加 P P DO 映射
正确的映射 PDO 非常重要。对于鸣志的驱动器,不需要手动自己映射,输出映射选择
默认的 RxPDO 1(0x1600),输入映射选择 TxPDO 1(0x1A00)即可。
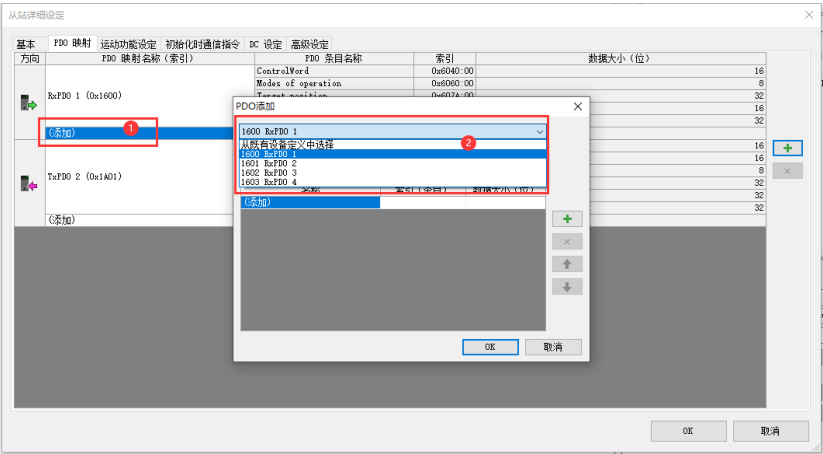
1、双击“添加”,进入 PDO 选择界面
2、直接选择默认的:即“从既有设备定义中选择”即可
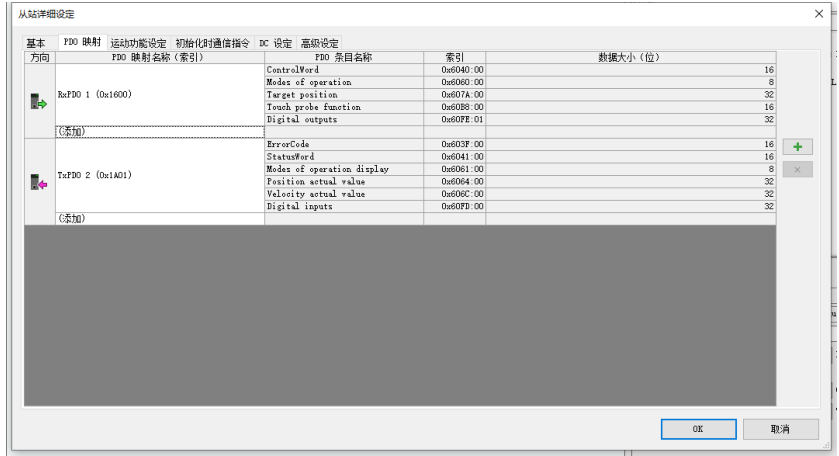
添加完成后的 PDO 列表:
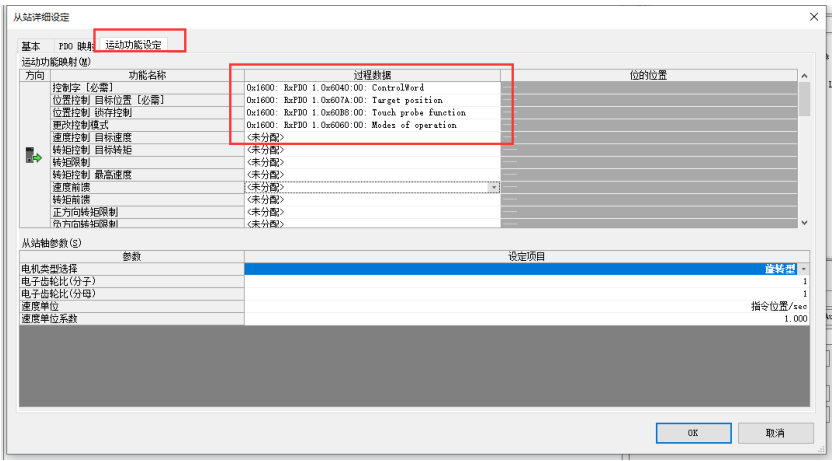
切换到运动功能设定,右键单击,选择自动分配(自动将 PDO 选中的功能分配到 PLC
的地址映射区):
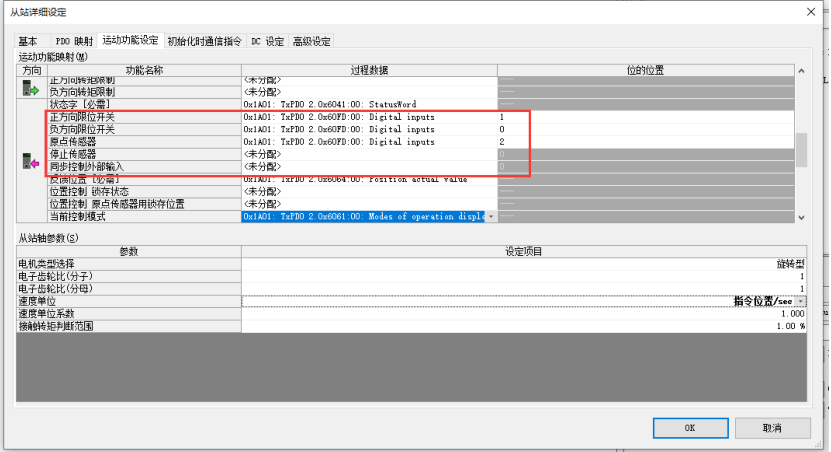
2.4 映射限位原点信号
在运动功能设定界面下,找到限位开关映射,正方向限位开关映射修改为 60FD.1,负限
位开关映射修改为 60FD.0,原点映射修改为 60FD.2
另外可以把停止传感器和同步控制外部输入都选择为“未分配”。
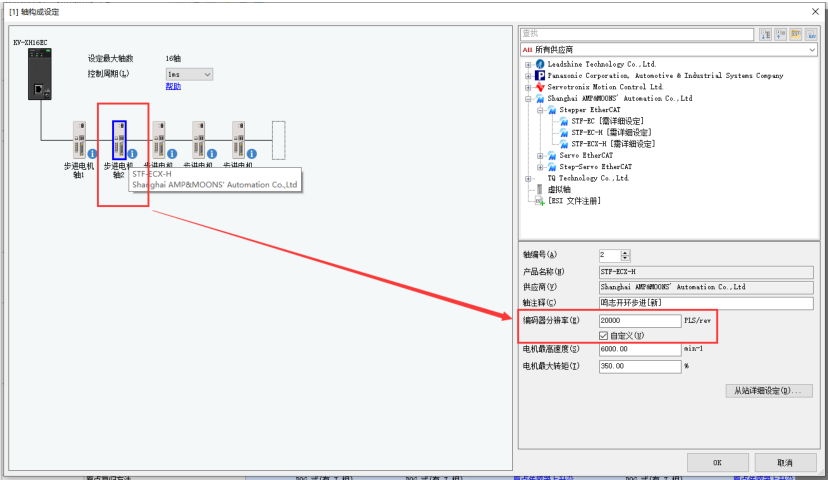
2.5 设置编码器分辨率
对于步进驱动器,这个参数对应驱动器上的电子齿轮比,PLC的设置值要跟驱动器上的
设置值保持一致。驱动器默认设置成 20000,所以这里也填 20000 即可。